
|
Product Details:
|
| Highlight: | Foreign Patent Soft Robotic Finger,Domestic Patent Soft Robotic Finger,CE Robotic Finger |
||
|---|---|---|---|
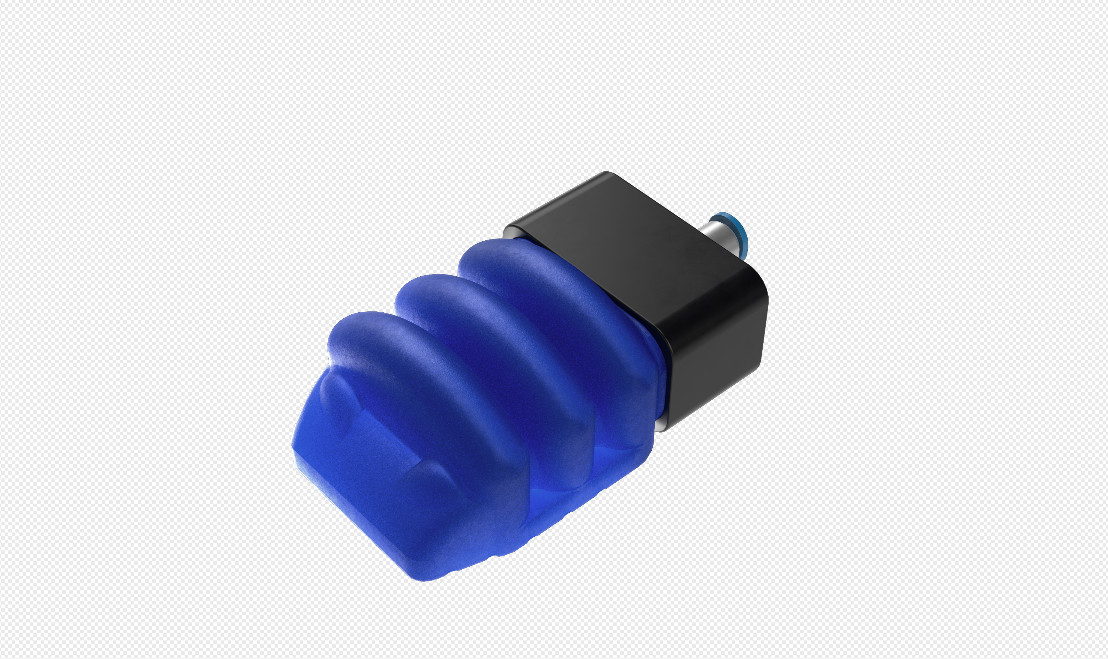
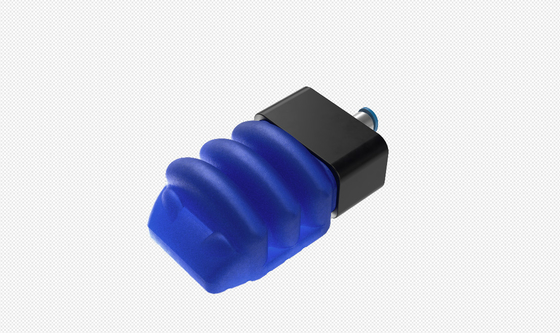
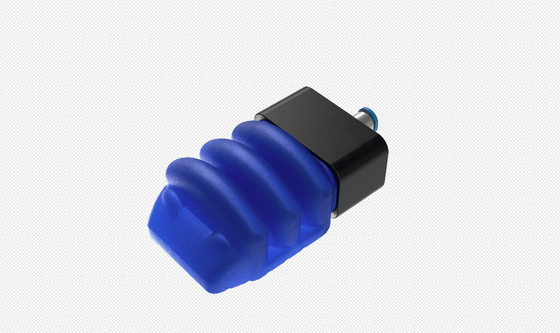
N5056 + domestic and foreign patents + soft robot fingers
Soft robot fingers that disrupt flexible gripping technology
The industrial automation market has evolved to the point where heavy, simple manual labour has been solved by proven solutions. The challenges left for machine replacement of manual labour are now focused on the automated production of multi-category, shaped and fragile items. Limited by the lack of flexible clamping fixtures, these items can only be loaded and unloaded manually, greatly limiting the production capacity of the manufacturer and increasing costs.
In fact, this is a common problem in the global industry and there has been no mature solution in China or abroad for a long time. In response to these needs, SRT developed a flexible robot finger to solve the industry-wide problem of automated loading and unloading of shaped and fragile items, and became the first company in China to develop and produce a flexible gripper.
| W/mm | 50 | |
| L/mm | 56 | |
| Ln/mm | 81.5 | |
| T/mm | 33.5 | |
| X/mm | 1.5 | |
| A/mm | 48 | |
| B/mm | 27 | |
| Smax/mm | 20 | |
| Ymax/mm | 31 | |
| weight/g | 121.2 | |
| fingertip thrust/N | 17 | |
| load coefficient of individual finger/g | vertical | 670 |
| pack | 1300 | |
| working speed/cpm | <110 | |
| product life/bout | >300W | |
| working pressure | -60~100kPa | |
| Connection diameter | 6mm | |
![]()
Contact Person: Miss. wang
Tel: +8618651125686