
|
Product Details:
|
| Weight: | 507g | ||
|---|---|---|---|
| Highlight: | Versatile Soft Robotics Gripper,1920g Load Soft Robotics Gripper,1920g Load Soft Robot Gripper |
||
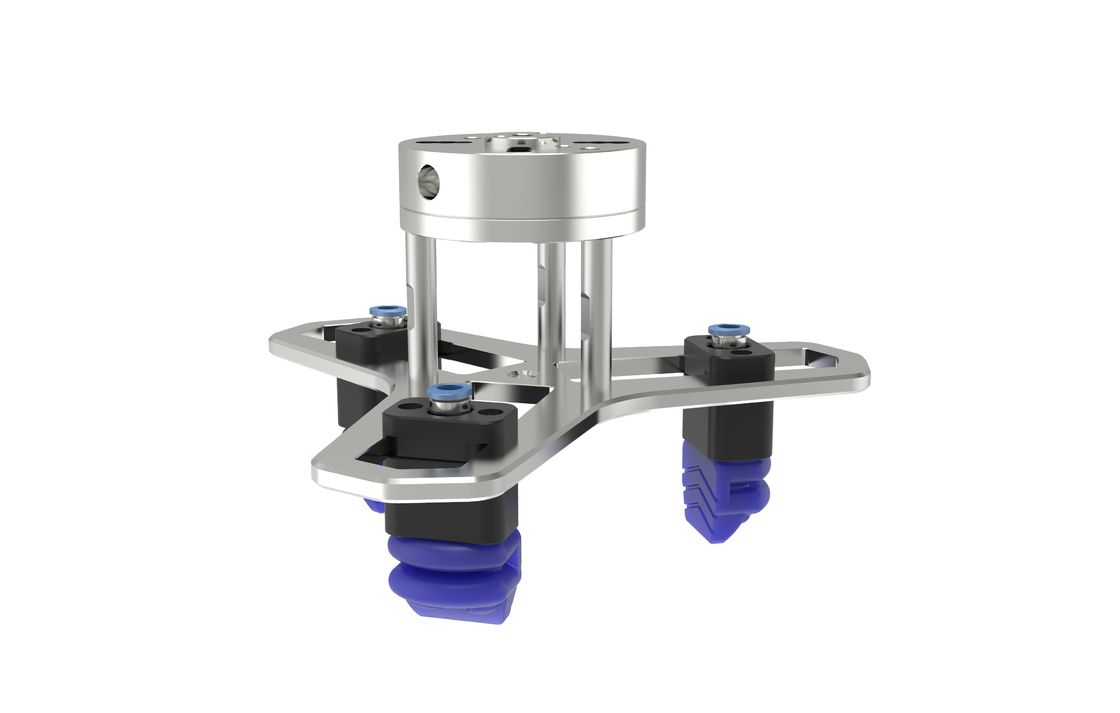
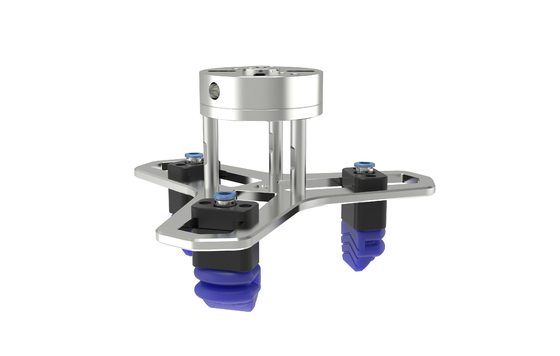
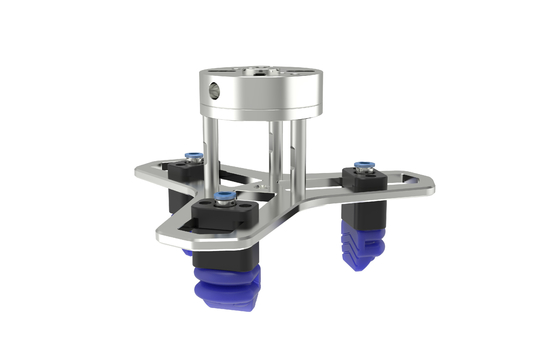
SFG-FNC3-N3025 + versatility + Soft robot gripper
Soft robot gripper using particles to transfer forces
Most conventional flexible actuators are driven by pneumatic or hydraulic pressure and require hermeticity and a large drive pump. During gripping, the gripper stiffness is often expected to increase with increased deformation, which is difficult to achieve for conventional actuators. This paper presents a soft-body actuator that uses particles to drive the grippers, no sealing is required and the actuator can be driven to bend using only a piston to push the particles. In experiments, when the volume of injected particles changed from 1.0 times the initial volume of the actuator to 1.8 times the initial volume, the actuator bent to 60° with a nearly seven-fold increase in stiffness compared to the initial state. To verify the feasibility of this method, a soft-body gripper consisting of three soft-body actuators was developed. This method provides an important alternative for the design and development of flexible grippers.
| φb | 200 |
| Wn | 30 |
| Dn | 31-142 |
| Lb | 68.2 |
| Lt | 62.7 |
| Ln | 44 |
| L | 25 |
| Smax | 6 |
| Ymax | 10 |
| workpiece dimension range | 31-154 |
| load(g) | 1920 |
| product weight(g) | 507 |
| maximum working pressure | 100kPa |
| product life | 300w |
![]()
Contact Person: Miss. wang
Tel: +8618651125686